"PID Autotune failed! Temperature too High!" How to PID tune a high watt heater
I’ve been busy retrofitting a BIQU B1 printer with the new BIQU H2 High Temperature extruder. However I ran into some trouble tuning in the 70 watt heater. Every time I attempted to PID auto tune it overshot way past the target temperature and the PID tuning process was aborted. So how to we fix this? Let’s see!
The Situation
I have rewired my BIQU B1 to handle this high power heater, and allow the BIQU H2 to be fitted in a fixed way. For this I’ve removed the entire USB-C cable and breakout board and wired everything directly to the mainboard.
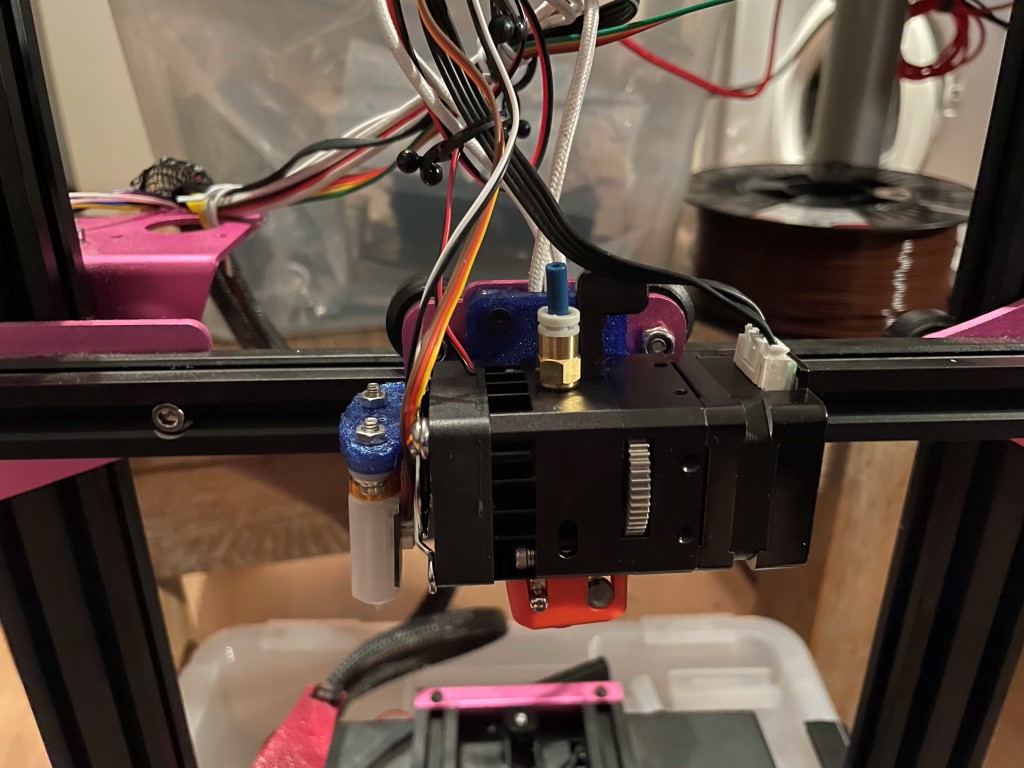 The BIQU H2 mounted to the BIQU B1 with a simple fixed mounting plate
The BIQU H2 mounted to the BIQU B1 with a simple fixed mounting plate
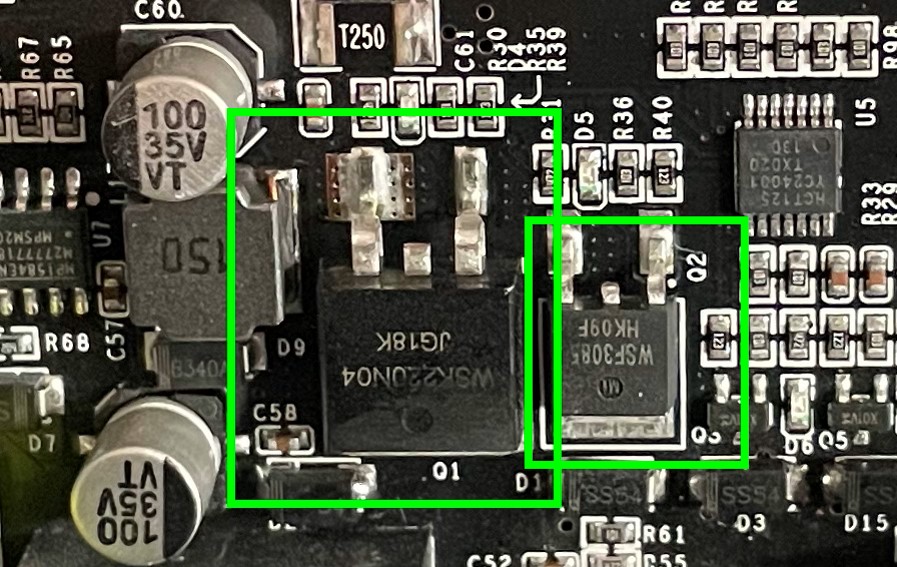
 I’ve wired all wires directly to the mainboard, and used both heater MOSFETs in parallel to share the load (Marlin option
I’ve wired all wires directly to the mainboard, and used both heater MOSFETs in parallel to share the load (Marlin option HEATERS_PARALLEL)
At the top right in the picture you find the MAX31865 on a stepstick board, which connects to the PT100 high temperature thermistor.
PID Autotune failed! Temperature too High!
When tuning in the temperature, I ran into the issue that I could never complete the PID cycle.
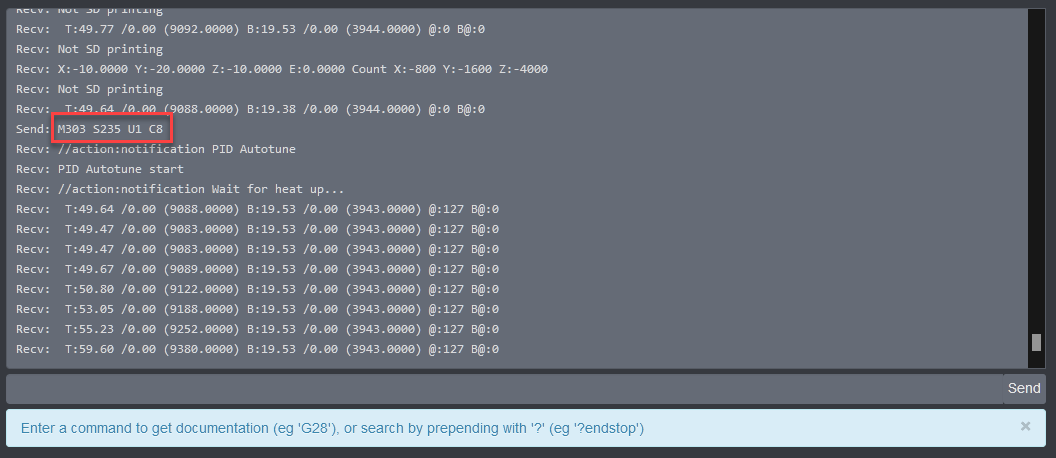 You can start a PID tune with the command
You can start a PID tune with the command M303 S235 U1 C8 where 235 is the target temperature and 8 the number of cycles. We also want to use the results, so we use “U1”.
Starting the PID tune was easy enough.
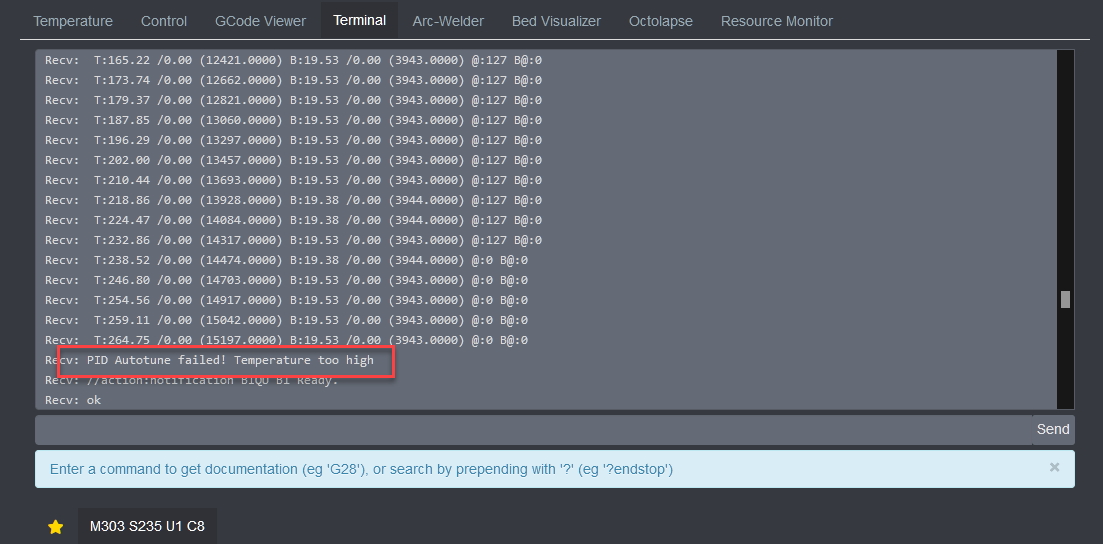 Marlin says: “PID Autotune failed! Temperature too High!” and aborts the auto-tune procedure
Marlin says: “PID Autotune failed! Temperature too High!” and aborts the auto-tune procedure
But the PID tuning aborted after overshooting by more than 30 degrees Celcius. This is a safety measure, but why does this happen? For this we need to dive a little deeper in Marlin’s heating process.
How heating in Marlin works
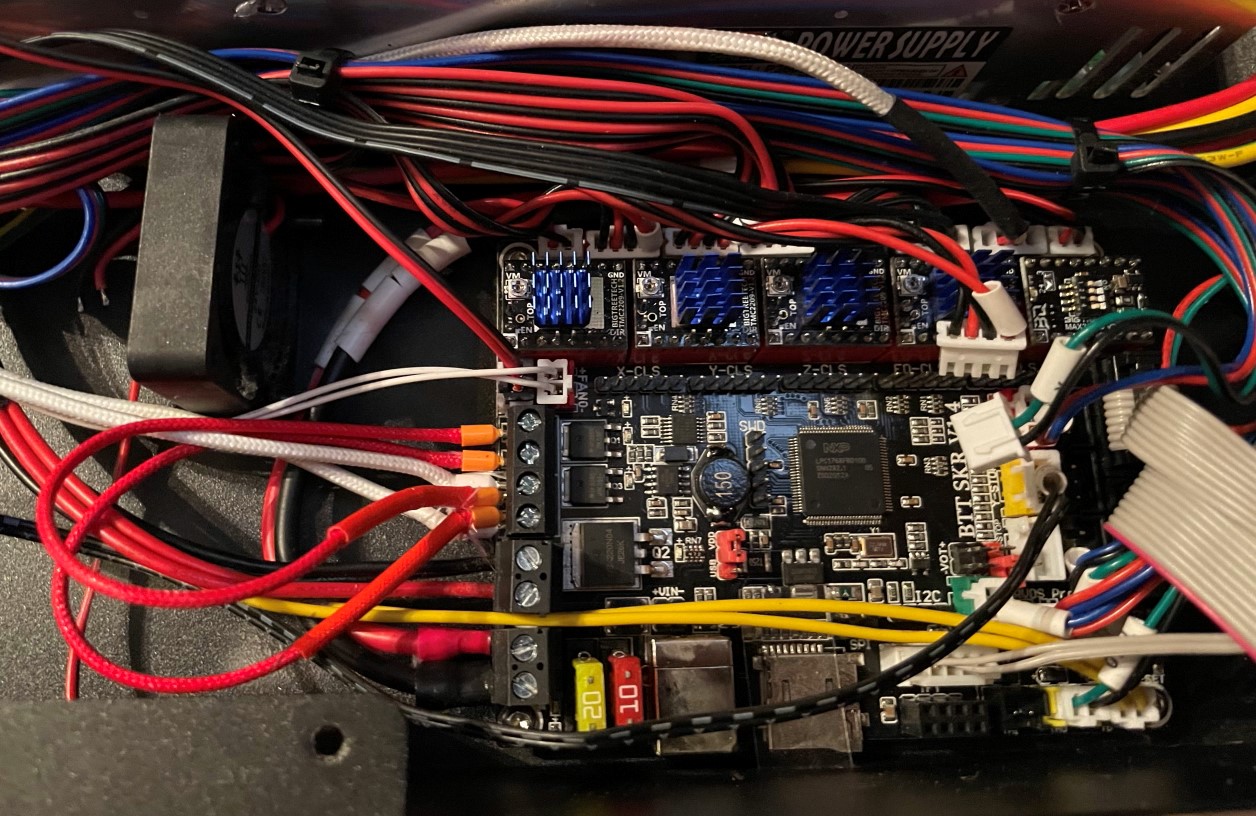
A heater is controlled by one or more MOSFETs, which are little chips which turn the heater on or off. There is no in-between state: the heater is either on or off.
 MOSFETs for bed heating and hot-end heating on a BTT SKR CR-6 board
MOSFETs for bed heating and hot-end heating on a BTT SKR CR-6 board
That poses a problem for accurate temperature control: How often do you enable power the heater, and for how longer? PID controlled heating solves this problem: The three values that define the PID configuration determine when and for how long to turn on the heater to reach or maintain a specific temperature.
However, the PID is only valid and efficient for a certain temperature range: A PID tuned for a temperature of 300C will not necessarily be valid for a temperature of 50C. For this reason Marlin employs PID only within a certain range of the target temperature: the PID functional range. For instance, with a PID_FUNCTIONAL_RANGE of 30 degrees, when you heat your hot-end to 230 degrees, PID will only be used when the hot-end temperature is in the range of 260-200C. (You might expect 215C-245C but that is not the case)
Bang bang
So what is used outside the PIDs functional range? That’s what we call bang-bang heating. This is follows a very simple algorithm: turn the heater on and watch the temperature. When the temperature rises above a certain limit, turn the heater off and wait for temperature to drop under the limit, turn the heater back on.
The bang-bang value can be tuned however: you can tell with BANG_MAX that instead of turning the heater for 100% (255) on, it should turn the heater only 50% of the time on (128). And this is one part of the solution.
Marlin PID parameters
There are several parameters in Marlins Configuration.h you can use:
#define BANG_MAX 255
#define PID_MAX BANG_MAX
#define PID_FUNCTIONAL_RANGE 10
As configured above this means:
BANG_MAX: Turn on the heater at a 100% duty cycle outside the PID’s functional range. The value range is 0-255, so 255 is 100%.PID_MAX: When in the PID functional range, allow the hot-end be at maximum on at this duty cycle (range 0-255 means 0-100%). It is here set to the same value as BANG_MAX, so 100%.PID_FUNCTIONAL_RANGE: The temperature range in which PID control is used.
The solution & explanation
When the heater is on, temperature does not immediately transfer. It takes a moment for the thermistor to get to the temperature as the heating occurs. We have the heater configured to run at 100% power - the full 70W. Yet, Marlin will only start using PID at 10C before the target temperature. That doesn’t leave a lot of margin - however this is only part of the issue. When PID tuning, Marlin will first put 100% power on the heater (according to PID_MAX).
There are two knobs we can turn:
PID_MAX: The amount of power we send to heater inside the PIDs functional rangePID_FUNCTIONAL_RANGE: Increase the functional range of PID
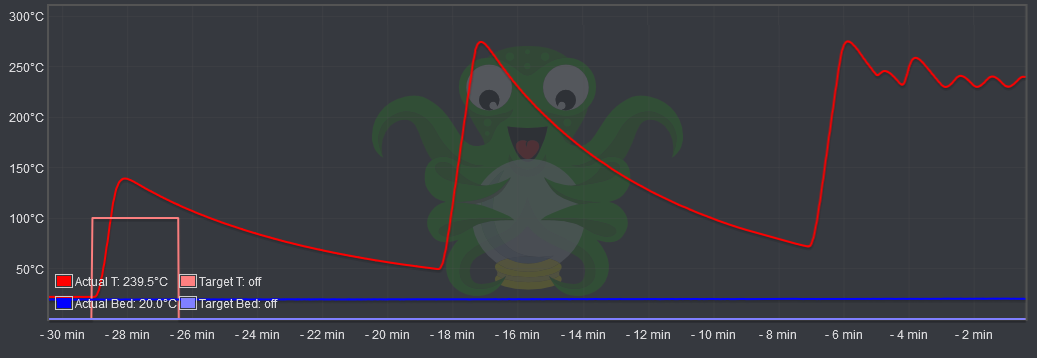 Trying to maintain temperature: (1) 40C overshoot attempting to heat to 100C, (2) failed PID tune for 235C, (3) I had increased the PID functional and the hot-end was already hot (within functional range), so second PID did go through
Trying to maintain temperature: (1) 40C overshoot attempting to heat to 100C, (2) failed PID tune for 235C, (3) I had increased the PID functional and the hot-end was already hot (within functional range), so second PID did go through
My first attempt was increasing PID_FUNCTIONAL_RANGE from 10 to 60. It appeared it didn’t work, but then it did, but it would never be stable when heating up the hot-end from a cold state.
So, I decreased PID_MAX from 255 to 100 - this did the trick. Getting reaching a temperature is way costs much more power than maintaining a temperature - so it is fine if we don’t have the full 70W available. With this I was able to do the PID tune.
 Don’t worry - during PID tuning the graph will shoot around the target temperature while the firmware learns how to control the heater
Don’t worry - during PID tuning the graph will shoot around the target temperature while the firmware learns how to control the heater
 If you’ve called M303 with the U1 gcode you can immediately save the new PID results with
If you’ve called M303 with the U1 gcode you can immediately save the new PID results with M500
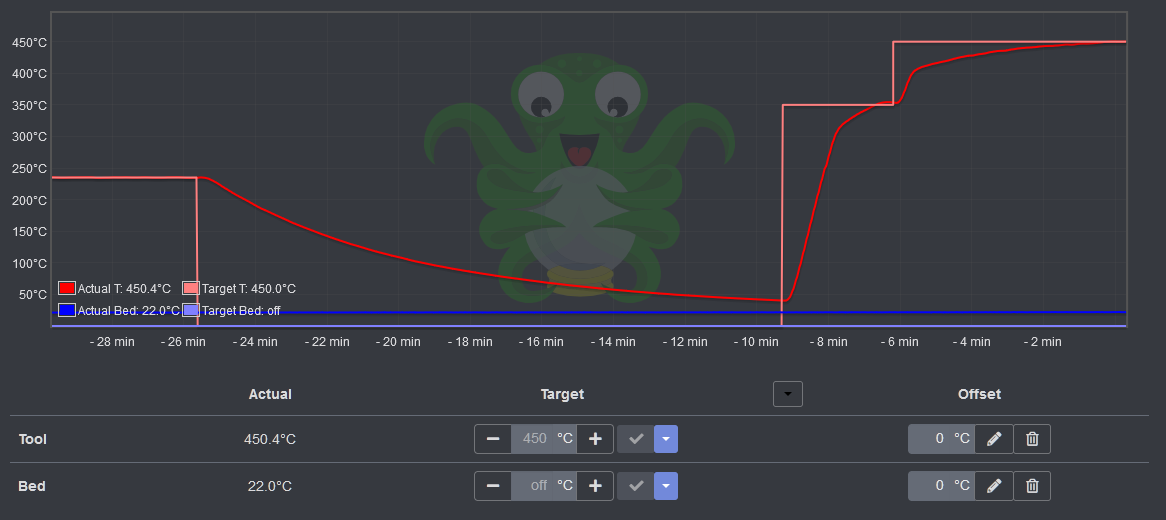
As you can see, after the PID tune I was able to maintain temperature perfectly.
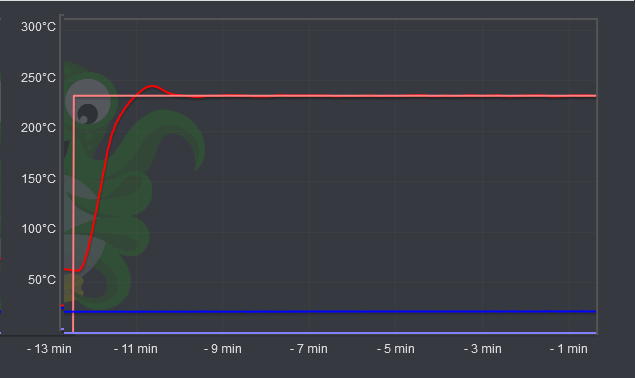 And an completely stable temperature after the PID tune!
And an completely stable temperature after the PID tune!
Conclusion
PID auto-tuning high power heaters in Marlin requires tuning some parameters you might otherwise not touch. However, by tuning the PID_MAX and PID_FUNCTIONAL_RANGE you can get PID auto-tuning to work stable, and tune your hot-end so it maintains a stable temperature. It is just a matter of understanding the parameters you have available to you.
 Hot hot hot!
Hot hot hot!
Happy printing!
What are your thoughts?